MY ACADEMIC JOURNEY
Research.
Research Interests
• Intelligent Robotics
• Digital Twin
• World Models
• Robot Vision
Current Research
Autonomous Mobile-Sensor Placement System Using Deep Reinforcement Learning for Digital Twin Construction
By enabling mobility in LiDAR-equipped robots, the system dynamically adjusted sensor positions to expand coverage, providing a practical and scalable solution for sensor placement in complex, changing urban environments.
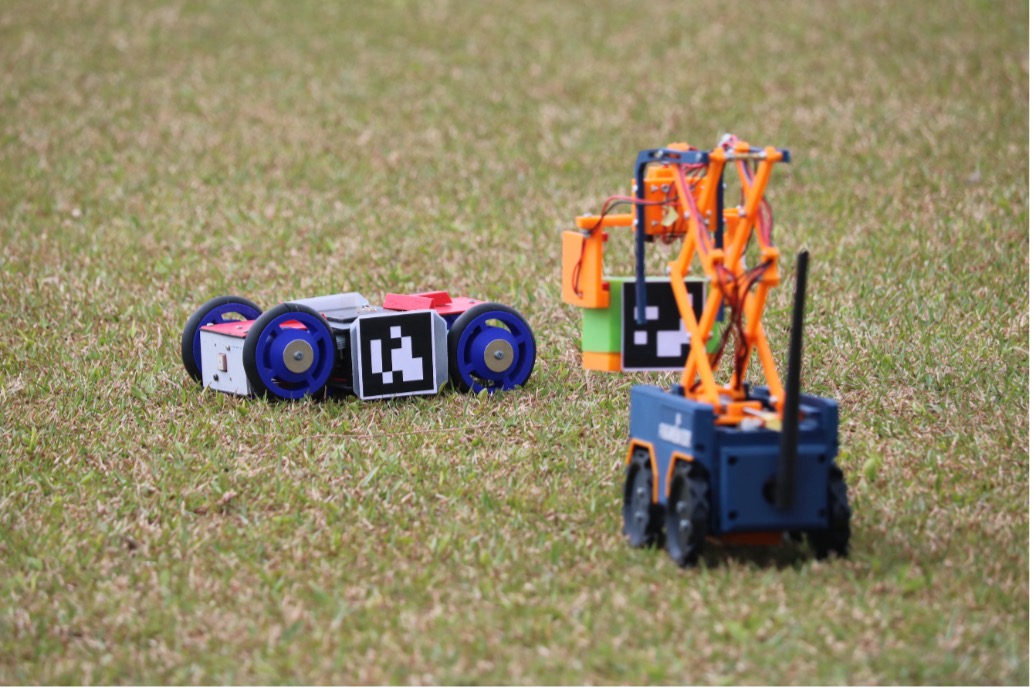
World Model-Based Communication Prediction and Multi-Robot Coordination Enabled by Digital Twin
Autonomous robotic systems using World Models for predictive communication and control, leveraging digital twins and multi-agent simulation to study adaptation in dynamic, networked environments.